曲线拟合
接上篇文章。用多项式拟合,有两种方式。一种是构造法方程组,解法方程组。另一种是生成自变量,问题看成多元线性回归,矩阵求广义逆。
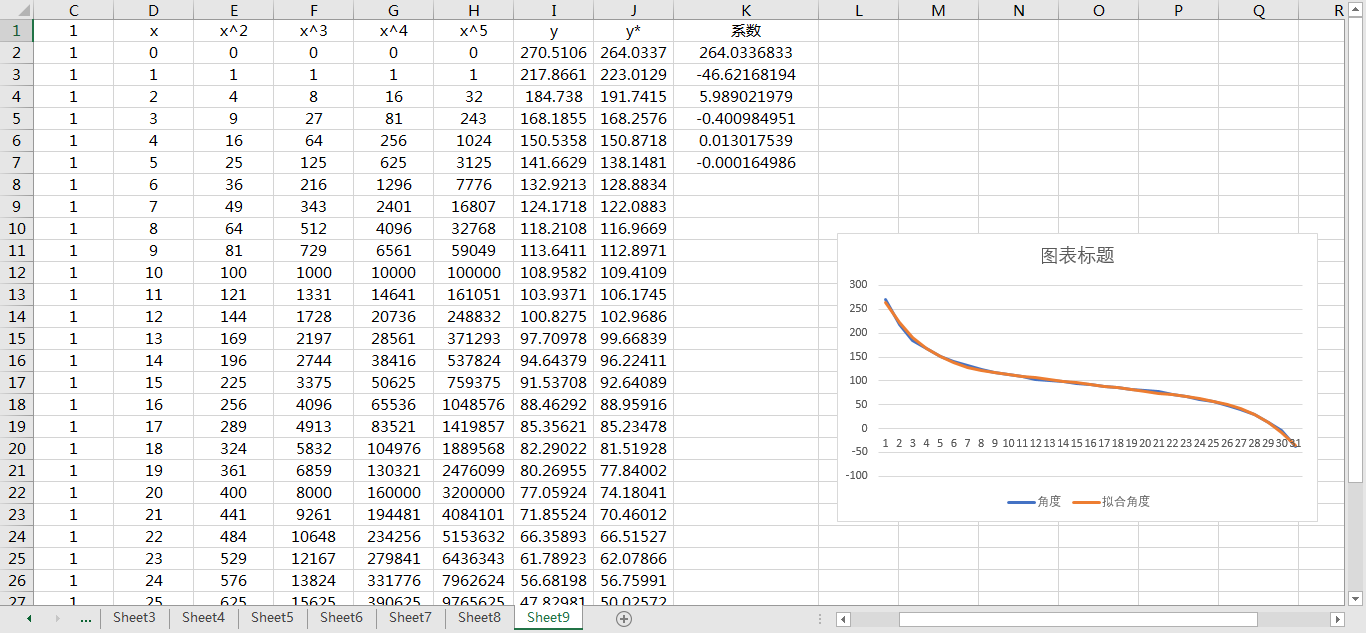
这里用第二种方法,先用 excel 尝试
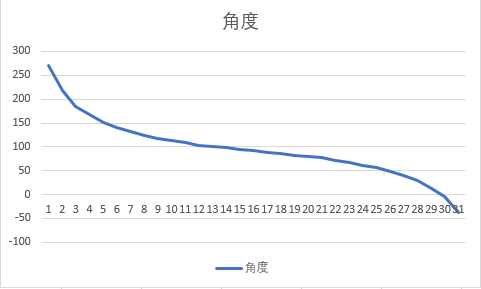
拟合前
拟合后

将之前代码的系数改一下
// 这里
[254.5074303, -41.48808654, 5.18375032, -0.348365691, 0.011489067, -0.000148665]
// 改成
[264.0336833, -46.62168194, 5.989021979, -0.400984951, 0.013017539, -0.000164986]效果如下
代码
一开始因为解方程需要矩阵求逆的原因,是不想写代码的。直到网上找到了 math.js 这个库,突然发现 js 可以算矩阵了。真爽,一下就把难题解决了
多项式拟合 api
/*
* @description:多项式拟合
* @params {Object} points: 待拟合点,格式为 [{x, y}, ...]
* @params {Number} pow: 多项式次数
* @return {Object}:多项式系数,拟合误差,格式为 {coef, error}
*/
function polyFit(points, pow) {
let eqns = mkEquations(points, pow),
coef = solveEquations(eqns),
error = evaluateFit({coef, points})
return {coef, error}
}
// 列方程组
function mkEquations(points, pow) {
let A = points.map(p => {
let row = []
for(let i=0; i<=pow; i++) row.push(p.x ** i)
return row
})
let b = points.map(p => p.y)
return {A, b}
}
// 解方程组
function solveEquations({ A, b }) {
let APlus = math.multiply(math.inv(math.multiply(math.transpose(A), A)), math.transpose(A))
return math.multiply(APlus, b)
}
// 计算拟合误差
function evaluateFit({ coef, points }) {
let x = points.map(p => p.x)
y1 = points.map(p => p.y),
y2 = x.map(x => solvePoly(coef, x)),
error = y2.reduce((ans, y, i) => ans + Math.abs(y2[i] - y1[i]), 0) / y2.length
return error
}
// 代多项式
function solvePoly(coef, x) {
return coef.reduce((ans, c, pow) => ans + c * (x ** pow), 0)
}这样用:
let points = [
{x: 0, y: 270.5106441},
{x: 1, y: 217.8660688},
{x: 2, y: 184.7380098},
{x: 3, y: 168.1855387},
{x: 4, y: 150.5357905},
{x: 5, y: 141.6628906},
{x: 6, y: 132.9213410},
{x: 7, y: 124.1717714},
{x: 8, y: 118.2107661},
{x: 9, y: 113.6410719},
{x: 10, y: 108.9581834},
{x: 11, y: 103.9370730},
{x: 12, y: 100.8274531},
{x: 13, y: 97.70977658},
{x: 14, y: 94.64379413},
{x: 15, y: 91.53708498},
{x: 16, y: 88.46291502},
{x: 17, y: 85.35620587},
{x: 18, y: 82.29022342},
{x: 19, y: 80.26955092},
{x: 20, y: 77.05923984},
{x: 21, y: 71.85523554},
{x: 22, y: 66.35892806},
{x: 23, y: 61.78923391},
{x: 24, y: 56.68197776},
{x: 25, y: 47.82980759},
{x: 26, y: 39.13845860},
{x: 27, y: 29.46420949},
{x: 28, y: 12.81789710},
{x: 29, y: -4.73800982},
{x: 30, y: -37.05485468}
]
let poly = polyFit(points, 5)
// {coef: [264.0336832917178,
// -46.621681946883854,
// 5.989021977896223,
// -0.4009849509054618,
// 0.013017538778813481,
// -0.0001649859462062585],
// error: 1.8659154769107695}1.8 度的误差, 也就是 360 度的 1 / 200,轨迹的精度在 99.5% 左右
暂无评论